En Alemania, un equipo de científicos de la Universidad Técnica de Munich (TUM) ha diseñado una piel artificial para robots, consiguiendo así que estas máquinas inteligentes tengan su propio sentido del tacto, publica la TUM en un comunicado. Gracias a esta piel, los robots podrán sentir la temperatura exterior y reaccionarán ante el contacto físico, es decir, serán conscientes del calor y del frío, de la misma forma que sentirán el roce de una caricia. Con esta información táctil, será posible por primera vez que las máquinas aumenten su percepción de la realidad, facilitada además por los ojos de una cámara, los escáneres infrarrojos o las manos articuladas. Para lograr este avance, los investigadores de la TUM fabricaron unas pequeñas placas hexagonales -del tamaño de una moneda-, que, al unirse, forman una piel sensible. Este trabajo se ha publicado en IEEEXplorer.
Al igual que ocurre con la piel humana, la piel artificial percibe si va a chocar con un objeto y como consecuencia, reacciona realizando algún movimiento, o sabe que está sujetando un objeto porque lo siente y además lo percibe a través del sentido de la vista. Ambos ejemplos que se muestran junto con otras funciones, en el siguiente vídeo;
La pieza central que conforma esta nueva cubierta robótica es un tablero de cinco centímetros cuadrado con una placa hexagonal integrada. Cada pequeña placa de circuito consta de cuatro sensores infrarrojos que reconocen la presencia de cualquier elemento a menos de un centímetro de distancia. "De esta manera, detecta cualquier roce, por ligero que sea", explica Mittendorfer.
Además, la placa contiene seis sensores de temperatura y un acelerómetro. Esto permite que la máquina registre con total precisión el movimiento de miembros individuales, por ejemplo, de sus brazos, y por lo tanto que sepa qué partes del cuerpo acaba de mover.
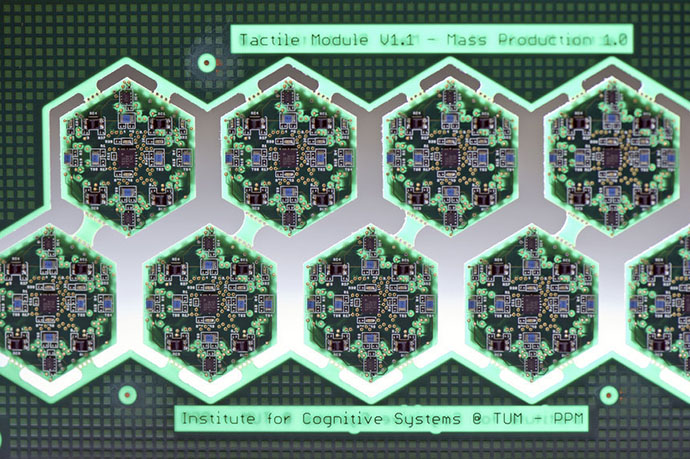
Placa a placa, todas las partes de este sistema de estructura completamente plana se colocan en forma de panal. Para que el robot tenga la capacidad de detección, las señales de los sensores son procesadas por un ordenador central.
Según el responsable del proyecto, “cada módulo sensorial pasa no sólo su propia información, sino que también sirve como centro de datos para los diferentes elementos sensoriales. Esto sucede automáticamente, asegurando que las señales lleguen de forma alternativa en caso de que una conexión falle”.
Por el momento, sólo una pequeña porción de piel se encuentra completa. Está formada por 15 sensores repartidos por los diferentes puntos del brazo robótico desarrollado.
Por el momento, sólo una pequeña porción de piel se encuentra completa. Está formada por 15 sensores repartidos por los diferentes puntos del brazo robótico desarrollado.
"Vamos a terminar de crear toda la piel y a generar un prototipo que esté completamente acabado con estos sensores, y que así pueda interactuar de nuevo con su entorno", afirma el profesor Gordon Cheng, supervisor del proyecto, quien añade que ésta será "una máquina que se dé cuenta de cuando le tocan la espalda... incluso en la oscuridad".
Los logros sensoriales no son los únicos aspectos pioneros de este proyecto. “Más allá de estas características, estas máquinas serán algún día capaces de incorporar nuestras capacidades neurobiológicas fundamentales y formar su propia impresión del entorno”, concluyen los investigadores de la TUM.
Fuentes:
- [tendencias21.net] Los robots ya pueden sentir, gracias a una piel artificial sensible